vector (mathematics)
Vector
It is not intuitive to regard vectors as just a special type of matrix. A vector (or more precisely a Euclidean vector in this case) is a geometric object that has magnitude (or length) and direction. These vectors can be added and scaled to form a vector space.
Given a vector space, \[V\] of dimension \[n\], over e.g. real numbers \[\mathbb{R}\]. Then, a vector is a \[n\]-tuple of numbers, e.g. when \[n=2,V=\mathbb{R}^{2}\], examples of vectors include \[(1,2)\], \[(0,0)\] and \[(-2,7)\].
Notation
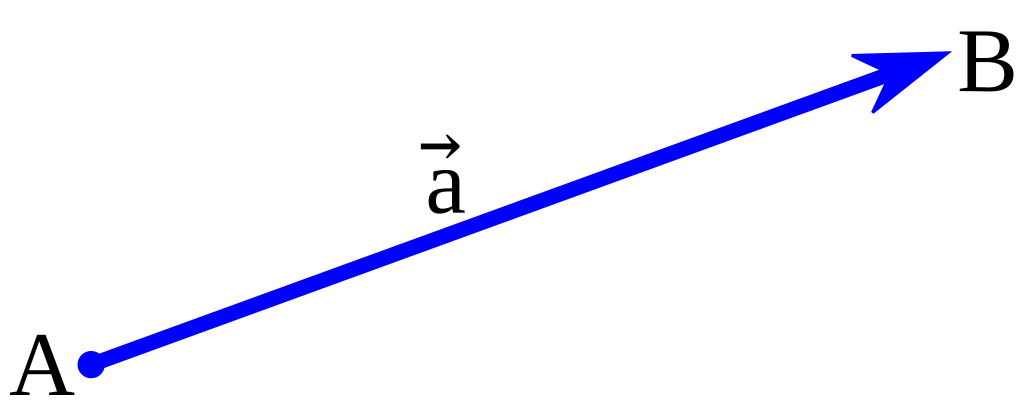
Vectors are usually denoted in lowercase boldface, e.g. \[\mathbf{u}\], \[\mathbf{v}\] or \[\mathbf{w}\], or when handwritten, the convention for indicating boldface type is \[\uwave{u}\] and \[\uwave{v}\]. Other conventions include \[\vec{u}\] and \[\vec{v}\] if the vector represents a directed distance of displacement across two points, or it can also be denoted as \[\overrightarrow{AB}\]. If the tail of the vector coincides with the origin, e.g. \[\overrightarrow{OA}=(2,3)\], it can be simply written as \[\mathbf{a}=(2,3)\] as the notion that the tail of the vector coincides with the origin is implicit and easily understood.
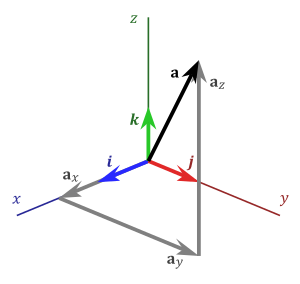
Besides parentheses, we often arrange them into a column vector or row vector, e.g. \[\mathbf{a}=\begin{pmatrix} a_{x}\\a_{y}\\a_{z} \end{pmatrix}=\begin{pmatrix} a_{x}&a_{y}&a_{z} \end{pmatrix}^{T}\], one could also use \[1,2,3,\dots\] instead of \[x,y,z,\dots\]. When generalised to \[\mathbb{R}^{n}\], \[\mathbf{a}=(a_{1},a_{2},a_{3},\cdots,a_{n-1},a_{n})\].
Another way to represent a vector of \[n\]-dimensions is to use standard basis vectors, e.g. \[\mathbf{a}=\mathbf{a}_{x}+\mathbf{a}_{y}+\mathbf{a}_{z}=a_{x}(1,0,0)+a_{y}(0,1,0)+a_{z}(0,0,1)=a_{x}\mathbf{e}_{1}+a_{y}\mathbf{e}_{2}+a_{z}\mathbf{e}_{3}\], where \[\mathbf{e}_{1}=(1,0,0),\mathbf{e}_{2}=(0,1,0),\mathbf{e}_{3}=(0,0,1)\]. In introductory textbooks, standard basis vectors are often denoted as \[\mathbf{i},\mathbf{j},\mathbf{k}\] or \[\hat{\mathbf{x}},\hat{\mathbf{y}},\hat{\mathbf{z}}\] instead. In this case, \[\mathbf{a}=a_{x}\mathbf{i}+a_{y}\mathbf{j}+a_{z}\mathbf{k}\].
Properties
Let \[\mathbf{a}=a_{1}\mathbf{e}_{1}+a_{2}\mathbf{e}_{2}+a_{3}\mathbf{e}_{3}\] and \[\mathbf{b}=b_{1}\mathbf{e}_{1}+b_{2}\mathbf{e}_{2}+b_{3}\mathbf{e}_{3}\].
Equality: \[\mathbf{a}\] and \[\mathbf{b}\] are equal if \[a_{1}=b_{1}\], \[a_{2}=b_{2}\], \[a_{3}=b_{3}\].
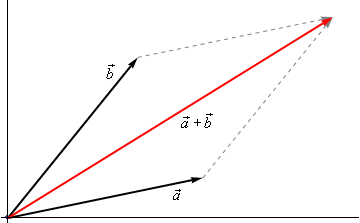
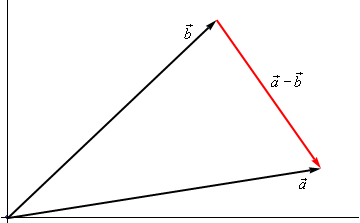
Addition and subtraction: \[\mathbf{a}\pm \mathbf{b}=(a_{1}\pm b_{1})\mathbf{e}_{1}+(a_{2}\pm b_{2})\mathbf{e}_{2}+(a_{3}\pm b_{3})\mathbf{e}_{3}\].
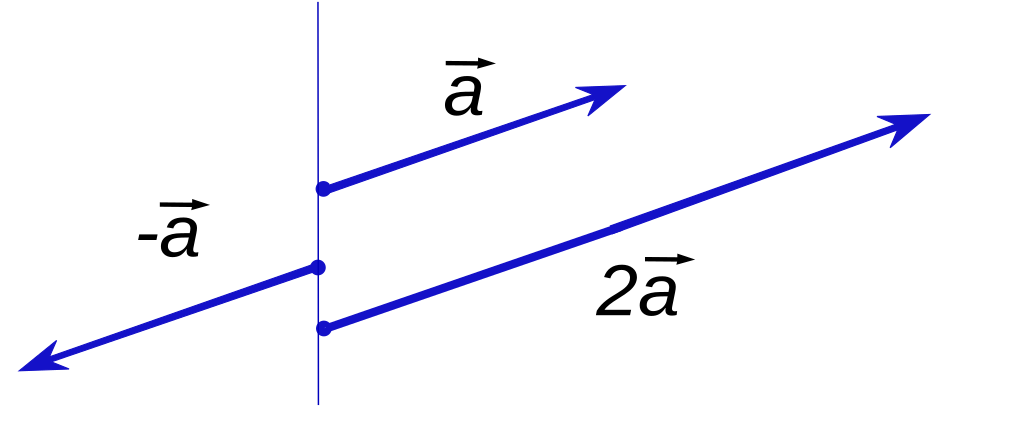
Scalar multiplication: \[r\mathbf{a}=(ra_{1})\mathbf{e}_{1}+(ra_{2})\mathbf{e}_{2}+(ra_{3})\mathbf{e}_{3}\].
Opposite vectors: \[\mathbf{a}\] and \[\mathbf{b}\] are opposite if \[a_{1}=-b_{1}\], \[a_{2}=-b_{2}\], \[a_{3}=-b_{3}\].
Parallel vectors: \[\mathbf{a}\] and \[\mathbf{b}\] are parallel if \[\mathbf{a}=\lambda \mathbf{b}\].
Length
The length (or magnitude/norm) of a vector, say \[\mathbf{u}\], is denoted by \[\lVert \mathbf{u} \rVert\], which is also equal to \[\left\lVert \mathbf{u} \right\rVert=\sqrt{u_{x}^{2}+u_{y}^{2}+u_{z}^{2}}\] as a consequence of the Pythagorean theorem (which makes it a strictly positive real number).
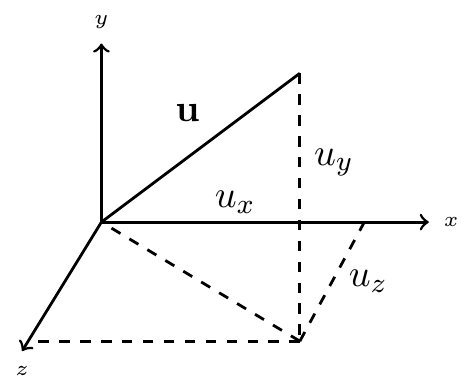
This can be easily proven with \[\left\lVert \mathbf{u} \right\rVert^{2}=u_{y}^{2}+\left( \sqrt{u_{x}^{2}+u_{z}^{2}} \right)^{2}\implies \left\lVert \mathbf{u} \right\rVert=\sqrt{u_{x}^{2}+u_{y}^{2}+u_{z}^{2}}\].
Note that \[\mathbf{u}^{T}\mathbf{u}=\begin{pmatrix} u_{x}&u_{y}&u_{z} \end{pmatrix}\begin{pmatrix} u_{x}\\u_{y}\\u_{z} \end{pmatrix}=\begin{pmatrix} u_{x}^{2}+u_{y}^{2}+u_{z}^{2} \end{pmatrix}\], which allows us to conclude that \[\left\lVert \mathbf{u} \right\rVert=\sqrt{\mathbf{u}^{T}\mathbf{u}}\].
Unit vector
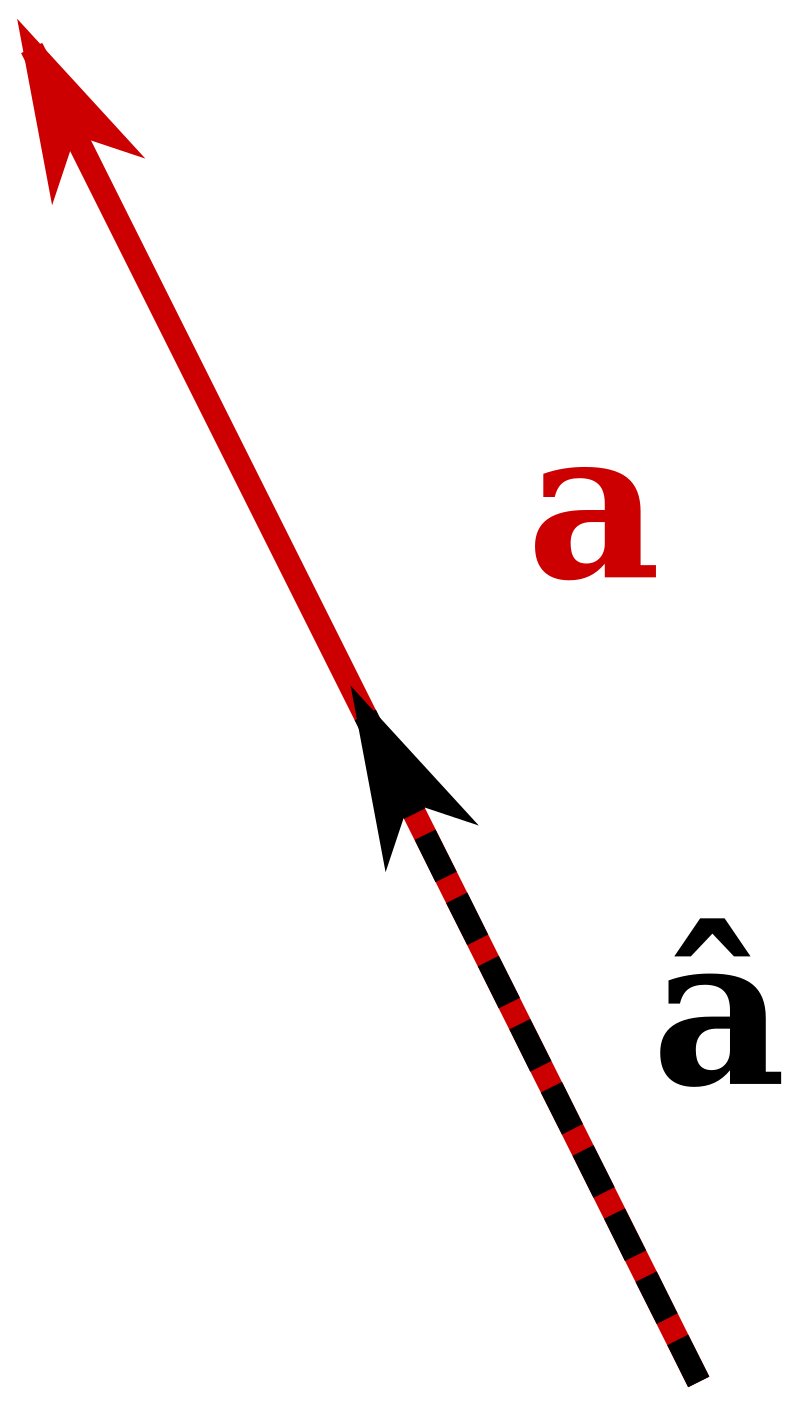
With the ability to find the length of a vector, we can then define a unit vector, which is a vector with a length of one, used simply to indicate direction. It is often indicated with a hat, e.g. \[\hat{\mathbf{u}}\]. The definition of a unit vector is then \[\hat{\mathbf{u}}=\frac{\mathbf{u}}{\left\lVert \mathbf{u} \right\rVert}=\frac{u_{x}}{\left\lVert \mathbf{u} \right\rVert}\mathbf{e}_{1}+\frac{u_{y}}{\left\lVert \mathbf{u} \right\rVert}\mathbf{e}_{2}+\frac{u_{z}}{\left\lVert \mathbf{u} \right\rVert}\mathbf{e}_{3}\].
This has many applications in mechanics, but a simple application in geometry is to enable one to write down a vector of specific length \[k\], say, in the direction of \[\mathbf{u}\] which is therefore \[k\hat{\mathbf{u}}\].
Suppose we have a force vector given by \[\mathbf{F}=\begin{pmatrix} 2\\-3\\6 \end{pmatrix}\text{N}\], \[\left\lVert \mathbf{F} \right\rVert=\sqrt{2^{2}+(-3)^{2}+(6)^{2}}=7\text{N}\]. Then, the unit vector in the direction of \[\mathbf{F}\] is given by \[\hat{\mathbf{F}}=\frac{\mathbf{F}}{\left\lVert \mathbf{F} \right\rVert}=\frac{1}{7}\begin{pmatrix} 2\\-3\\6 \end{pmatrix}\], \[\therefore \hat{\mathbf{F}}=\begin{pmatrix} \frac{2}{7}\\-\frac{3}{7}\\\frac{6}{7} \end{pmatrix}\]. Note that a unit vector has no physical unit as it is the ratio of the vector by it's length, which it very different from a vector of length one in some unit.
Referenced by:
-
dot product
-
projection (linear algebra)
-
linear span
-
Coulomb's law
-
vector space
-
relative velocity
-
electric potential energy
-
conservation of momentum
-
gravitational potential
-
angular and tangential velocity in circular motion
-
field (physics)
-
linear combination
-
position and displacement vector
-
basis (linear algebra)
-
equations of lines and planes
-
cross product
-
vector field
-
momentum
-
linear independence
-
row and column vectors