basis (linear algebra)
Basis
A set \[B\] of a vector space \[V\] is called a basis if every element of \[V\] can be written in a unique way as a finite linear combination of elements of \[B\]. The coefficients of this linear combination are referred to as components or coordinates of the vector with respect to \[B\] and the elements of this basis set are called basis vectors.
In simpler words, a basis is a set of vectors that generates all elements of the vector space and the vectors in the set are linearly independent.
Examples
.svg.png)
In \[\mathbb{R}^{2}\], a basis can be a set that consists of two vectors, \[(1,0)\] and \[(0,1)\]. It is trivial to show why that set satisfies the definition of basis. Logically, by both multiplying \[(1,0)\] and \[(0,1)\] by some scalar and then adding them together (taking their linear combination), we can form every point in the two-dimensional real space (write every element in \[V\] in a unique way).
Additionally, any other pair of linearly independent vectors of \[\mathbb{R}^{2}\], e.g. \[(1,1)\] and \[(-1,2)\], can also form a basis of \[\mathbb{R}^{2}\]. If this statement does not hold true, this implies that there are some points in two-dimensional space that can't be formed by two linearly independent vectors, which contradicts the definition of span.
Standard basis
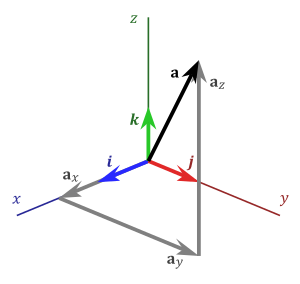
This brings us to the standard basis. The standard basis is the set of vectors, each of whose components are all zero, except one that equals to 1. For example, the standard basis for \[\mathbb{R}^{3}\] is a set of vectors whose elements are \[(1,0,0)\], \[(0,1,0)\] and \[(0,0,1)\]. There are several common notations for standard basis vectors, including \[\left\{ \mathbf{e}_{x},\mathbf{e}_{y},\mathbf{e}_{z} \right\}\] and \[\left\{ \mathbf{i},\mathbf{j},\mathbf{k} \right\}\], which represents each direction.