linear span
Span
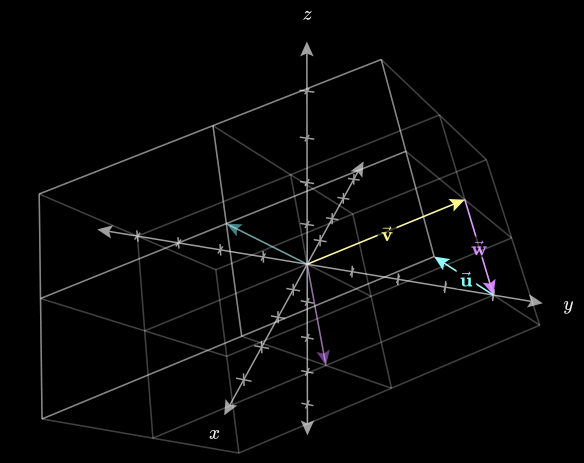
The figure above illustrated the span of \[\mathbf{v}\] and \[\mathbf{u}\].
The span (or linear span) of a set \[S\] of elements of a vector space \[V\] is the smallest linear subspace of \[V\] that contains \[S\]. It is the set of all finite linear combinations of the elements of \[S\], and the intersection of all linear subspaces that contain \[S\]. It is often denoted as \[\text{span}(S)\] or \[\left\langle S \right\rangle\].
In other words, the span of \[S\] is a vector space such that if the vectors in set \[S\] are in \[V\], then \[S\] is a subspace of \[V\].
Intuitive idea
![]()
An illustration by 3blue1brown demonstrating the span of one and two linearly independent vectors whose linear combinations filling the entire \[\mathbb{R}\] and \[\mathbb{R}^{2}\] plane respectively.
By the axioms of a vector space, given a set of vectors you can add and subtract, or multiply them by a scalar, which is exactly what a span of a set of vectors is. In other words, the span is essentially a set of all the vectors you can possibly make using the origin set of vectors and the three operations.
We can then deduce geometrically that the span of a single vector, \[\vec{v}\], is exactly the line through the origin in direction \[\vec{v}\]. This is because no matter what we do to \[\vec{v}\], e.g. adding it to itself (essentially multiplying \[\vec{v}\] by two), subtracting it with itself (forming \[\vec{0}\]), or multiplying \[\vec{v}\] by some arbitrary scalar, we would end up with the form \[\lambda\vec{v}\] where \[\lambda\] is some scalar.
Next, take two vectors, \[\vec{v}\] and \[\vec{w}\] which are linearly independent, the span is the plane that contains the origin and the line in direction \[\vec{v}\] and \[\vec{w}\]. Mathematically, we can write this as \[\left\langle \left\{ \vec{v},\vec{w} \right\} \right\rangle=\left\{ s\vec{v}+t\vec{w}\mid s,t\in \mathbb{R} \right\}\], i.e. if we draw every the entire set out we will get a 2-dimensional plane.
So, if we're dealing with \[\mathbb{R}^{n}\] vector spaces, \[k\] linearly independent vectors will span a \[k\]-dimensional subspace, regardless of the dimensions of the vector itself, e.g. two 3-dimensional vectors will span \[\mathbb{R}^{2}\]. For example, let \[S=\left\{ (1,0,0),(0,1,0),(1,1,0) \right\}\]. This set's span is not \[\mathbb{R}^{3}\] despite having three vectors as the set is a linear combination of \[\left\{ (1,0,0),(0,1,0) \right\}\], thus the spanned space is \[\mathbb{R}^{2}\].

Intuitively, we can think of the span as say, in the context of having two vectors in a 3-dimensional space, as turning two knobs to change the length of each arrow. We can, in fact, reach every point on the plane just by changing the length of the two arrows. Mathematically, this would mean changing the two scalars, adding the scaled vectors, then following the tip of the resulting vector, i.e. running through every possible combination of \[a\vec{v}+b\vec{w}\], where \[a\] and \[b\] are real numbers. This implies that every point on said plane can be expressed with that equation alone.
That tip will trace out some kind of flat sheet cutting through the origin of three-dimensional space. That, is our \[\mathbb{R}^{2}\] plane, which is also the span of our two vectors.
Now consider our third vector \[(1,1,0)\], unfortunate for us, this also happens to be sitting on the span of the first two, "trapping" us on the same flat sheet. If we changed that way to say, \[(0,0,1)\], then it's pointing in another separate dimension which gives us access to a third dimension. Similarly, the mathematical equivalent to that statement would be to calculate every possible combination of \[a\vec{v}+b\vec{w}+c\vec{u}\] where \[a\], \[b\] and \[c\] are real numbers. If we plotted every point obtained from every possible combination, we would find that the points would form (or span) a \[\mathbb{R}^{3}\] space.
Definition
Given a vector space \[V\] over a field \[K\], the span of a set \[S\] of vectors (can be an infinite set) is defined to be the smallest subspace of \[V\] that contains \[S\], i.e. span of \[S\] is the subspace that is contained in every other subspace that contains \[S\]. The term "smallest" here refers to the sense where it's the most minimal subspace that can still contain every linear combination of \[S\].
\[S\] is sometimes called a spanning set of a subspace, say \[W\], then \[S\] spans \[W\].
It follows that from this definition that the span of \[S\] is set of all finite linear combinations of elements of \[S\], and can be defined as \[\text{span}(S)=\left\{ \lambda_{1}\mathbf{v}_{1}+\lambda_{2}\mathbf{v}_{2}+\cdots+\lambda_{n}\mathbf{v}_{n}\mid n\in \mathbb{N}, \mathbf{v}_{1},\dots, \mathbf{v}_{n}\in S,\lambda_{1},\dots,\lambda_{n}\in K \right\}\].