cross product
Cross product
The cross product is an operation on two vectors in a three-dimensional oriented Euclidean vector space. Given two linearly independent vectors \[\mathbf{a}\] and \[\mathbf{b}\], the cross product \[\mathbf{a}\times \mathbf{b}\] is a vector that is perpendicular to both \[\mathbf{a}\] and \[\mathbf{b}\], thus being normal to the plane containing them.
Definition
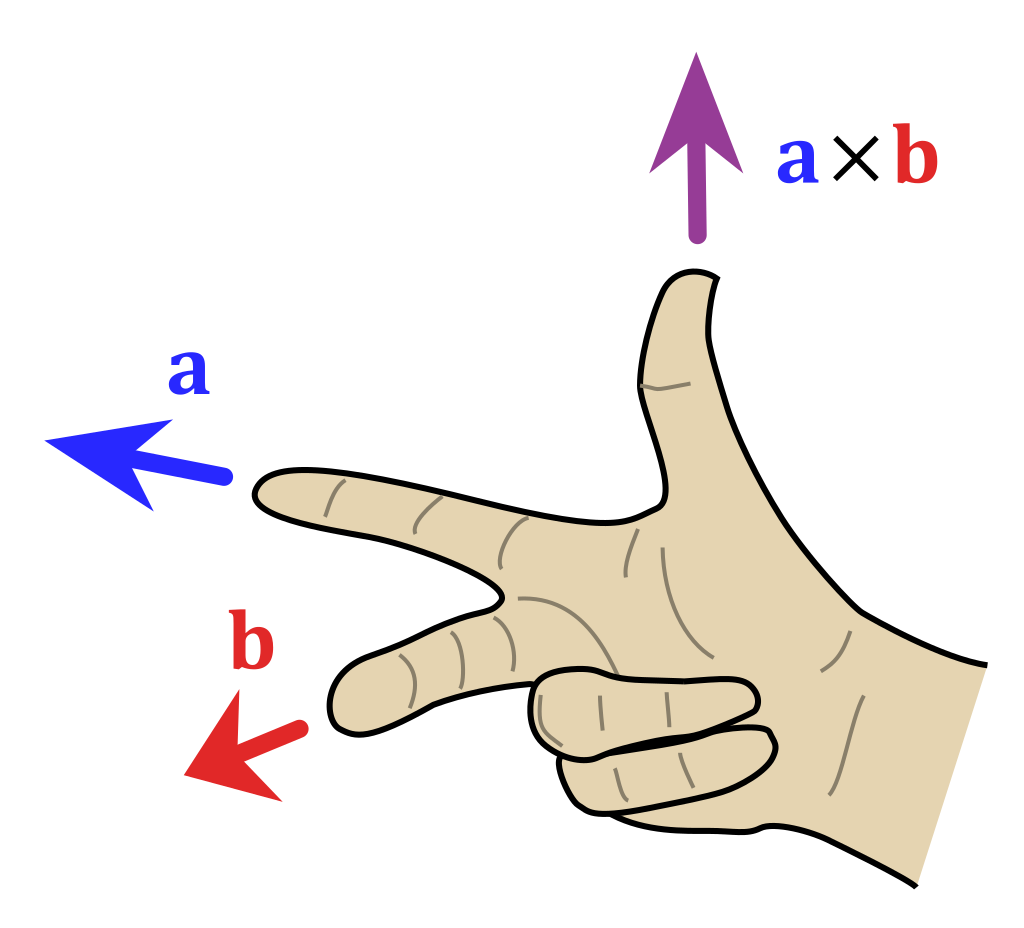
The cross product of two vectors \[\mathbf{a}\] and \[\mathbf{b}\] is defined as a vector \[\mathbf{c}\] that is orthogonal to both \[\mathbf{a}\] and \[\mathbf{b}\], with a direction given by the right-hand rule and a magnitude equal to the area of the parallelogram that is spanned by the vectors.
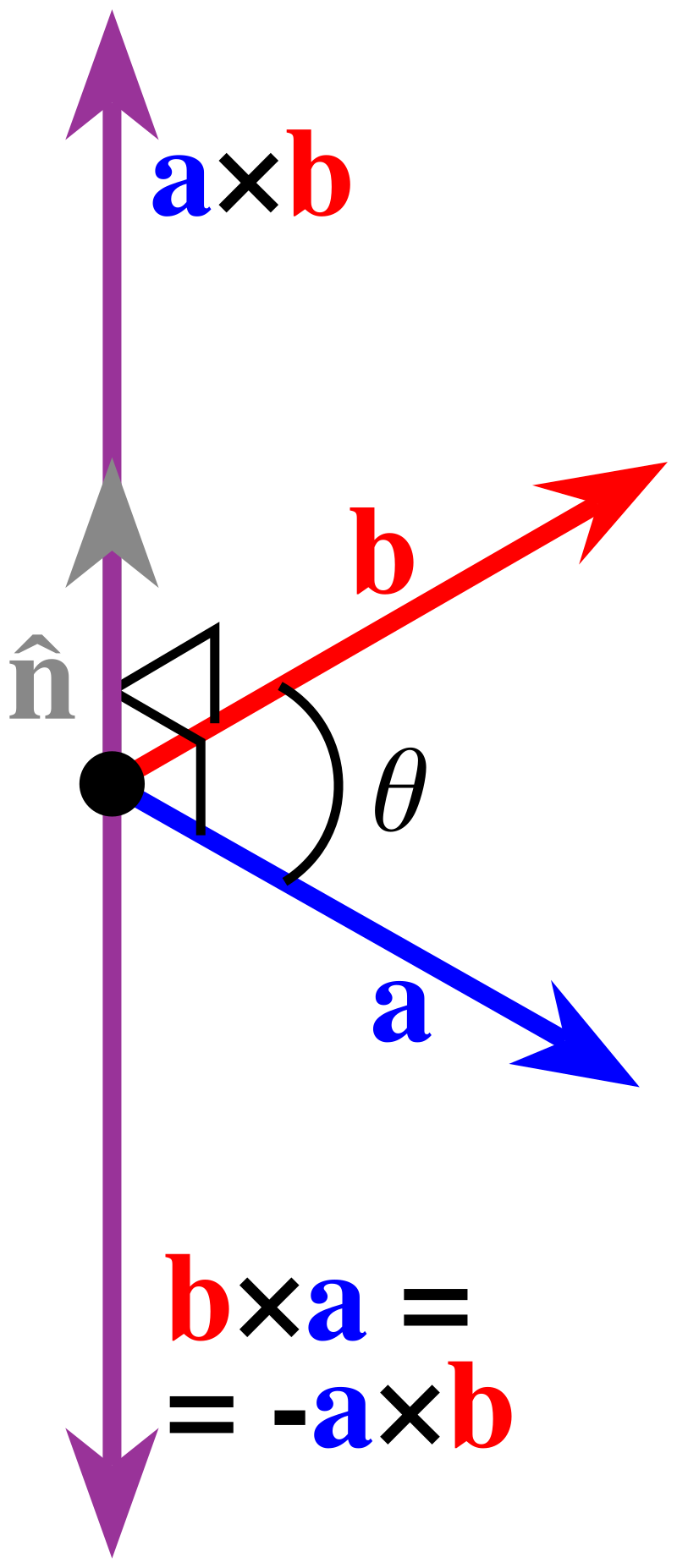
The cross product is defined by the formula \[\mathbf{a}\times \mathbf{b}=\left\lVert \mathbf{a} \right\rVert \left\lVert \mathbf{b} \right\rVert\sin(\theta)\mathbf{n}\], where \[\theta\] is the angle between \[\mathbf{a}\] and \[\mathbf{b}\] and \[\mathbf{n}\] is the unit vector orthogonal to the plane containing \[\mathbf{a}\] and \[\mathbf{b}\], with direction such that the ordered set \[(\mathbf{a},\mathbf{b},\mathbf{n})\] is positively oriented.
Essentially, the result of \[\mathbf{a}\times \mathbf{b}\] is a vector of magnitude \[\left\lVert \mathbf{a} \right\rVert \left\lVert \mathbf{b} \right\rVert\sin(\theta)\] and direction \[\mathbf{n}\]. Alternatively, the resultant vector can also take the form \[\begin{pmatrix} a_{2}b_{3}-a_{3}b_{2}\\a_{3}b_{1}-a_{1}b_{3}\\a_{1}b_{2}-a_{2}b_{1} \end{pmatrix}=(a_{2}b_{3}-a_{3}b_{2})\mathbf{i}+(a_{3}b_{1}-a_{1}b_{3})\mathbf{j}+(a_{1}b_{2}-a_{2}b_{1})\mathbf{k}\]. Note that both are equivalent.
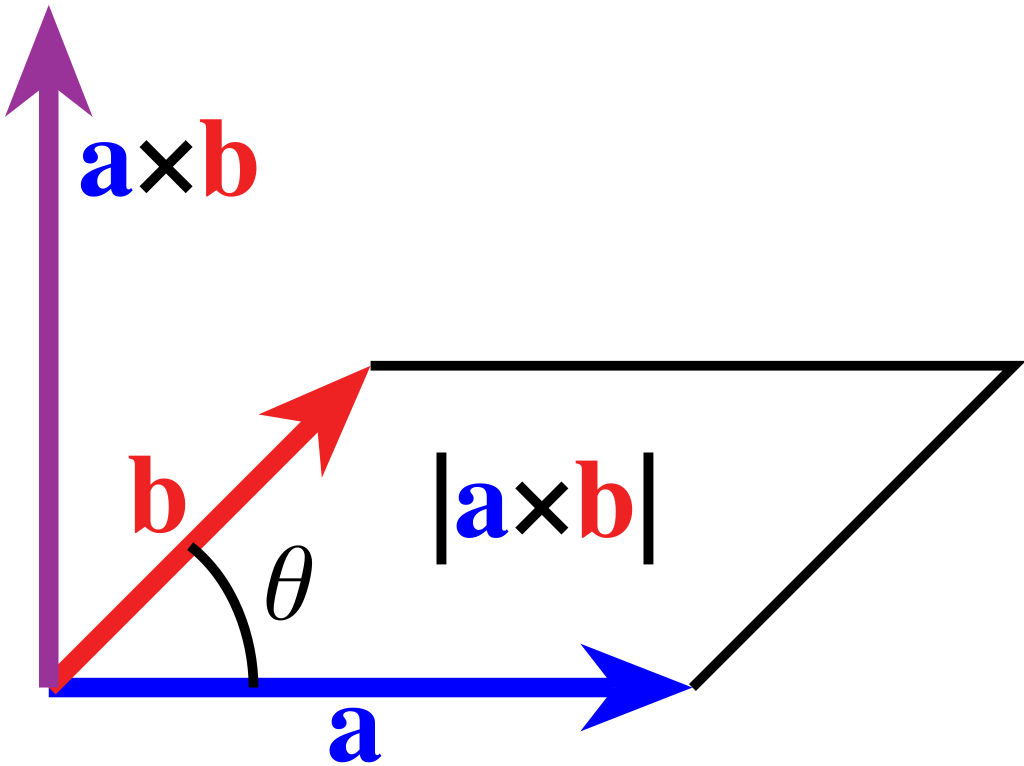
It is trivial to show why the magnitude of the cross product is the area to the parallelogram that is spanned by vectors \[\mathbf{a}\] and \[\mathbf{b}\]. The area of a parallelogram is the it's length (\[\left\lVert \mathbf{a} \right\rVert\]) multiplied by height (\[\left\lVert \mathbf{b} \right\rVert\sin\theta\]). Therefore, the area of the parallelogram is given by \[\left\lVert \mathbf{a} \right\rVert \left\lVert \mathbf{b} \right\rVert\sin(\theta)\], which is the magnitude of our resultant vector.
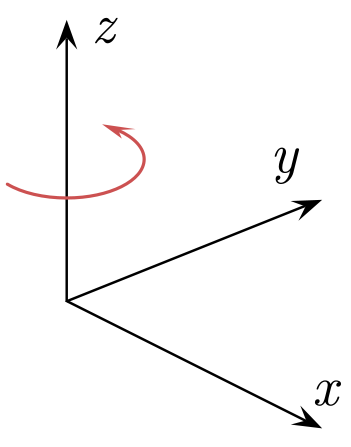
Positively oriented (right-hand rule) refers to this:
The cross product also has the properties:
- \[\mathbf{a}\times \mathbf{a}=\mathbf{0}\] (zero vector)
- \[\mathbf{a}\times \mathbf{b}=-(\mathbf{b}\times \mathbf{a})\]
- \[\mathbf{a}\times (\mathbf{b}+\mathbf{c})=(\mathbf{a}\times \mathbf{b})+(\mathbf{a}\times\mathbf{c})\]
- \[(r\mathbf{a})\times \mathbf{b}=\mathbf{a}\times (r\mathbf{b})=r(\mathbf{a}\times \mathbf{b})\]
Derivation
To compute the cross product, we first have to establish that the cross products between standard basis vectors, i.e. \[\mathbf{i}\times \mathbf{j}=\mathbf{k}\], \[\mathbf{j}\times \mathbf{i}=-\mathbf{k}\], \[\mathbf{i}\times \mathbf{k}=-\mathbf{j}\], \[\mathbf{k}\times \mathbf{i}=\mathbf{j}\], \[\mathbf{j}\times \mathbf{k}=\mathbf{i}\] and \[\mathbf{k}\times \mathbf{j}=-\mathbf{i}\].
Now assume we have two vectors \[\mathbf{a}\] and \[\mathbf{b}\]. Each vector can be decomposed into its three orthogonal components, \[\mathbf{a}=a_{1}\mathbf{i}+a_{2}\mathbf{j}+a_{3}\mathbf{k}\] and \[\mathbf{b}=b_{1}\mathbf{i}+b_{2}\mathbf{j}+b_{3}\mathbf{k}\]. Then,
This tells us that the result of the cross product \[\mathbf{a}\times \mathbf{b}\], call it resulting vector \[\mathbf{c}\], is \[\begin{pmatrix} c_{1}\\c_{2}\\c_{3} \end{pmatrix}=\begin{pmatrix} a_{2}b_{3}-a_{3}b_{2}\\a_{3}b_{1}-a_{1}b_{3}\\a_{1}b_{2}-a_{2}b_{1} \end{pmatrix}\].
Another simpler way we can calculate the resulting vector of the cross product is by taking the determinant of \[\begin{pmatrix} \mathbf{i}&\mathbf{j}&\mathbf{k}\\a_{1}&a_{2}&a_{3}\\b_{1}&b_{2}&b_{3} \end{pmatrix}\]. Using the rule of Sarrus, \[\mathbf{a}\times \mathbf{b}=(a_{2}b_{3}\mathbf{i}+a_{3}b_{1}\mathbf{j}+a_{1}b_{2}\mathbf{k})-(a_{3}b_{2}\mathbf{i}+a_{1}b_{3}\mathbf{j}+a_{2}b_{1}\mathbf{k})=(a_{2}b_{3}-a_{3}b_{2})\mathbf{i}+(a_{3}b_{1}-a_{1}b_{3})\mathbf{j}+(a_{1}b_{2}-a_{2}b_{1})\mathbf{k}\].
Now, we've successfully derived the resultant vector of the cross product. To link this result with the original formula \[\left\lVert \mathbf{a} \right\rVert \left\lVert \mathbf{b} \right\rVert\sin(\theta)\] (we will omit \[\mathbf{n}\] for the time being), we will calculate the magnitude of the resultant vector of the cross product,
We're almost done, remember the geometric definition of the dot product, i.e. \[\mathbf{a}\cdot \mathbf{b}=\left\lVert \mathbf{a} \right\rVert \left\lVert \mathbf{b} \right\rVert\cos\theta\implies \cos\theta=\frac{\mathbf{a}\cdot \mathbf{b}}{\left\lVert \mathbf{a} \right\rVert \left\lVert \mathbf{b} \right\rVert}\], with that, we can rewrite it as
Although when we take square root of both sides we usually add a \[\pm\] sign, but since \[\left\lVert \mathbf{a} \right\rVert\], \[\left\lVert \mathbf{b} \right\rVert\] and \[\sin\theta\] where \[0^{\circ}\le\theta\le180^{\circ}\] are all positive, there is no need to add any additional signs.
Therefore, we've shown that \[\left\lVert \mathbf{a}\times \mathbf{b} \right\rVert=\left\lVert \mathbf{a} \right\rVert \left\lVert \mathbf{b} \right\rVert\sin\theta\]. Now that we have the magnitude, multiplying this scalar by the unit vector that's orthogonal to \[\mathbf{a}\] and \[\mathbf{b}\] will get us the resultant vector of the cross product.