torque
Torque
The ability of a force to rotate an object about an axis is called torque.
Also known as moment of force, and typically denoted as \[\tau\]. It is to note that the moment of a vector field \[\vec{v}\] at position \[\vec{r}\] is \[\vec{r}\times \vec{v}\], while torque is simply a special case where the vector field we look at is the force field, i.e. \[\vec{v}=\vec{F}\], which is why it's called moment of force (instead of just moment).
The moment of a force is a measure of its tendency to cause a body to rotate about a specific point or axis. This is different from the tendency for a body to move, or translate, in the direction of the force. In order for a moment to develop, the force must act upon the body in such a manner that the body would begin to twist. This occurs every time a force is applied so that it does not pass through the centroid of the body. A moment is due to a force not having an equal and opposite force directly along its line of action.
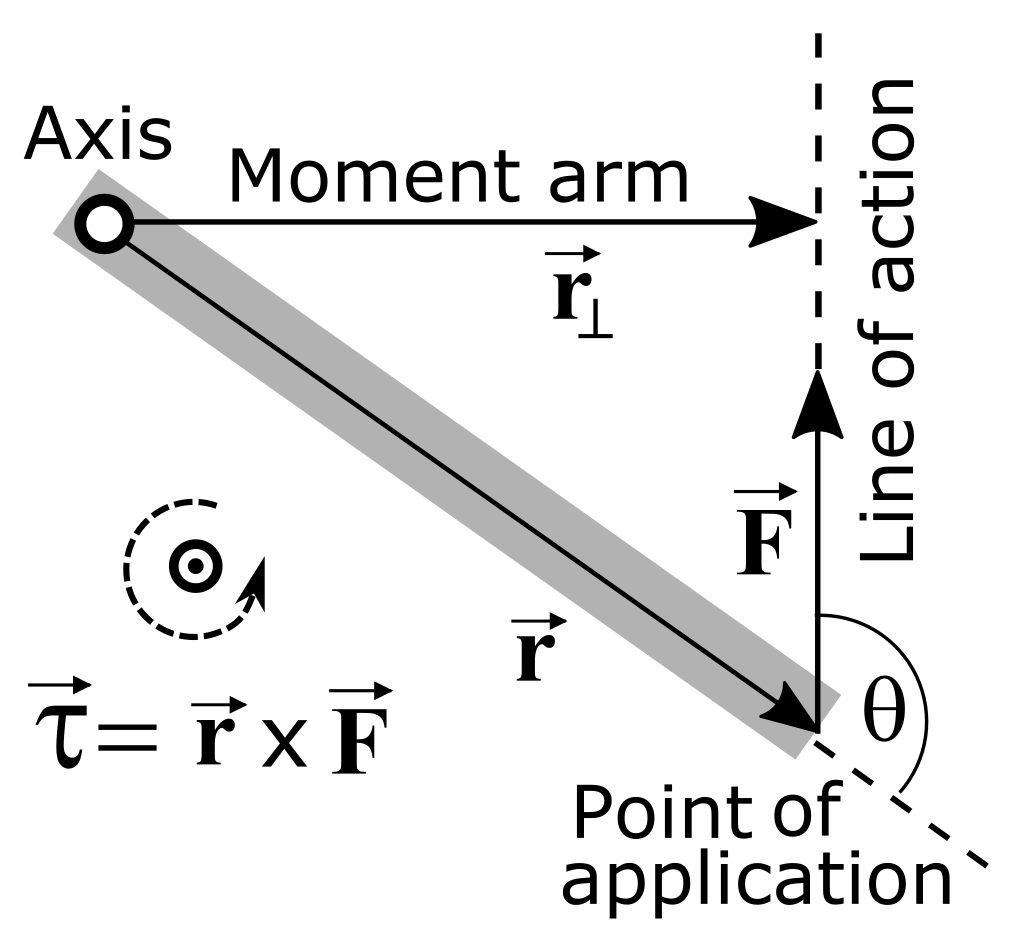
The moment of a force \[F\] about a point is equal to \[\tau=rF\] where \[F\] is the magnitude of the force and \[r\] is the perpendicular distance from the point to the line of the action of the force. Line of action of a force \[\vec{F}\] is the straight line through the point at which the force is applied, and is in the same direction as the vector \[\vec{F}\].
Based on the picture above, we can also calculate the magnitude of a moment of force with vector cross product, i.e. \[\left\lVert \vec{\tau} \right\rVert=\left\lVert \vec{r}\times\vec{F} \right\rVert\].
If there are several coplanar forces acting, the total turning effect about a point is the algebraic sum of the moments of force about that point.
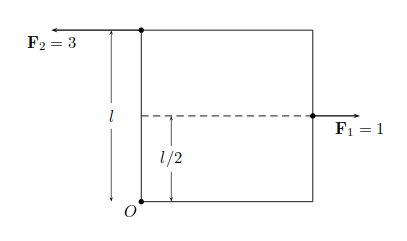
Moment of \[\mathbf{F}_{1}\] about \[O\] is \[-1\times \frac{l}{2}=-\frac{l}{2}\] while the moment of \[\mathbf{F}_{2}\] about \[O\] is \[3\times l=3l\], therefore the total moment is \[3l-\frac{l}{2}=\frac{5l}{2}\].
Do note that conventionally counterclockwise is the positive rotation direction and clockwise is the negative direction.
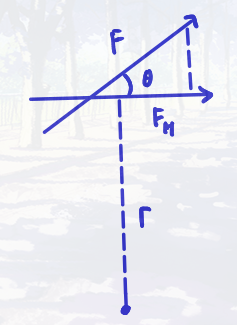
Another way to calculate the perpendicular component of a force is to using the trigonometric identity \[\cos\theta=\frac{F_{H}}{F}\], \[F_{H}=F\cos\theta\], therefore \[\tau=r\cdot(F\cos\theta)\].
Two dimensions
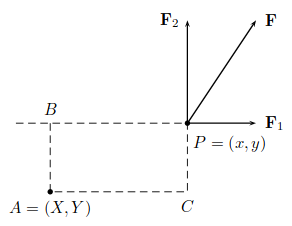
Suppose \[\mathbf{F}\] is in vector form and acts on \[P\], whose coordinates are \[(x,y)\] and we want the moment about point \[A\] whose coordinates are, say \[(0,0)\].
Let \[\mathbf{F}=\mathbf{F}_{1}+\mathbf{F}_{2}=F_{1}\mathbf{i}+F_{2}\mathbf{j}\], where \[F_{1}\] and \[F_{2}\] are the two components. Notice that the perpendicular distance from \[A\] to the line of action of \[\mathbf{F}_{1}\] is length \[AB\] and the perpendicular distance from \[A\] to the line of action of \[\mathbf{F}_{2}\] is length \[AC\].
So, the total moment of both is again the algebraic sum, i.e. \[\tau=-F_{1}(y-0)+F_{2}(x-0)\]. The reason why \[F_{1}\] has a negative is that imagine we "shift" \[F_{1}\] to \[B\] (we can "shift" it however we like as long as it stays on the line of action), then it becomes very obvious that it's in the clockwise direction.
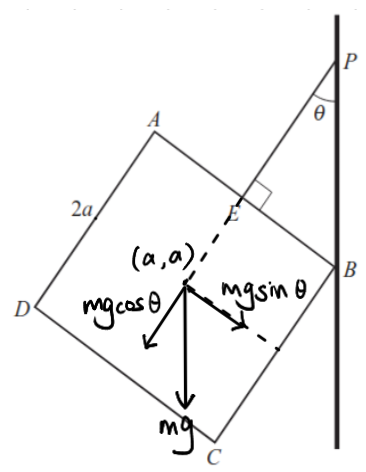
Note that during problem solving, it is recommended to draw the "rectangle" based on the directions of the components of \[\mathbf{F}\]. The example above shows the contributions of \[mg\] on the moment about point \[B\].
Couples
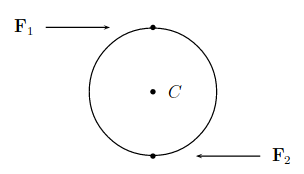
If we have \[\mathbf{F}_{2}=-\mathbf{F}_{1}\] then the line of action of \[\mathbf{F}_{2}\] is in the opposite direction to that of \[\mathbf{F}_{1}\]. Provided the lines of action are not the same, but parallel to each other,then we have a turning effect even though the resultant is zero. This situation where there is a turning effect but with resultant equal to zero, is called a couple. When a couple acts upon a body there is no change in position but there may be a rotation. So, in short, a couple or torque is a pair of forces that are equal in magnitude but opposite in their direction of action.
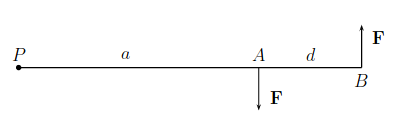
This is an example of a couple, \[\mathbf{F}\] are of equal magnitude and are opposite in their direction of action. Clearly, the couple has a moment, and we can find the magnitude by apply the formula above, \[\tau=-Fa+F(a+d)=Fd\]. \[d\] can also be said to be the perpendicular distance between the two parallel forces.
Proof
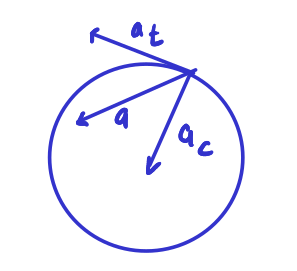
We know that \[F=ma_{t}\] where \[t\] is the tangential acceleration best illustrated as below, and angular acceleration \[a_{t}=r\alpha\]:
where we identify \[rF=\tau\] and \[mr^{2}=I\], where \[I\] is the moment of inertia.
Center of mass
For center of masses, moment (torque) about the x-axis or y-axis describes the rotational effect of a force or mass distribution relative to the y-axis in a coordinate system. In simpler terms, it's a measure of how much a shape or mass tends to rotate around the y-axis, if it were allowed to rotate.