mathematical description of a wave
Mathematical description of a wave
The following is the mathematical description of a travelling wave.
Derivation
Before we start describing a wave mathematically, it is useful to recall that if \[f(x)\] is some function, then \[f(x-d)\] is the same function translated in the positive \[x\]-direction by a distance \[d\] while \[f(x+d)\] translates it in the negative \[x\]-direction by a distance \[d\].
To construct the model of the wave using a periodic function, we first start with the relationship \[\frac{\Delta \theta}{2\pi}=\frac{\Delta x}{\lambda}\]. This equation expresses the fact that when the spatial coordinate \[x\] increases by one wavelength \[\lambda\], the phase \[\theta\] advances by a full cycle (i.e. \[2\pi\] radians). Rearranging this equation we get \[\Delta \theta=\frac{2\pi}{\lambda}\Delta x\].
To model the \[y\]-position of the wave as a function of the \[x\]-position, let \[A\] be the amplitude, we know that in a sine wave, \[y=A\sin\theta\]. Substituting \[\theta\], we get \[y(x)=A\sin \left( \frac{2\pi}{\lambda}x \right)\]. However, this equation just describes the wave at time \[t=0\], i.e. a stationary wave. For it to be time-dependent and "travel" in the positive direction, we know that after some time \[t\], the \[x\] position will have shifted to the right by \[\lambda\cdot \frac{t}{T}\], assuming it takes time \[T\] to complete one oscillation. Notice that the definition of wave speed is \[v=\frac{\lambda}{T}\], which allows us to replace \[\lambda\cdot \frac{t}{T}=vt\]. Then as mentioned above, to shift a function to the right, we do \[f(x-d)\], similar here, \[y(x-vt)=y(x,t)=A\sin \left( \frac{2\pi}{\lambda}(x-vt) \right)=A\sin \left( \frac{2\pi}{\lambda}x-\frac{2\pi}{\lambda}vt \right)\].
Replace \[k=\frac{2\pi}{\lambda}\] where \[k\] is the wavenumber and \[v=\frac{\lambda}{T}\], we get \[A\sin \left( kx-\frac{2\pi}{\lambda}\left( \frac{\lambda}{T} \right)t \right)=A\sin(kx-\omega t)\] where \[\omega\] is the angular frequency. To generalize this formula, \[y(x,t)=A\sin(kx\mp \omega t)\], where the minus sign is for waves moving in the positive x-direction, and the plus sign is for waves moving in the negative x-direction.
To allow for a "head-start" for waves, so that they don't necessarily have to start at the zero angle, we add a constant \[\phi_{0}\], known as the initial phase or phase constant, which is an angle that tells us at what angle this wave is at when \[x=0\] and \[t=0\]. Combine this, we get our final equation \[y(x,t)=A\sin(kx\mp\omega t+\phi_{0})\].
Phase, \[\phi\]
The phase of a wave is a measure of where the wave is in its cycle at a given moment (or more simply its angle), and is the \[kx\mp \omega t+\phi_{0}\] portion of our wave equation.
The phase function is mathematically defined as \[\phi(x,t)=\frac{2\pi}{\lambda}x-\frac{2\pi}{T}t+\phi_{0}\]. The result we obtain from this formula tells us the angle (in radians) of the wave at position \[x\] and time \[t\] on a sine graph.
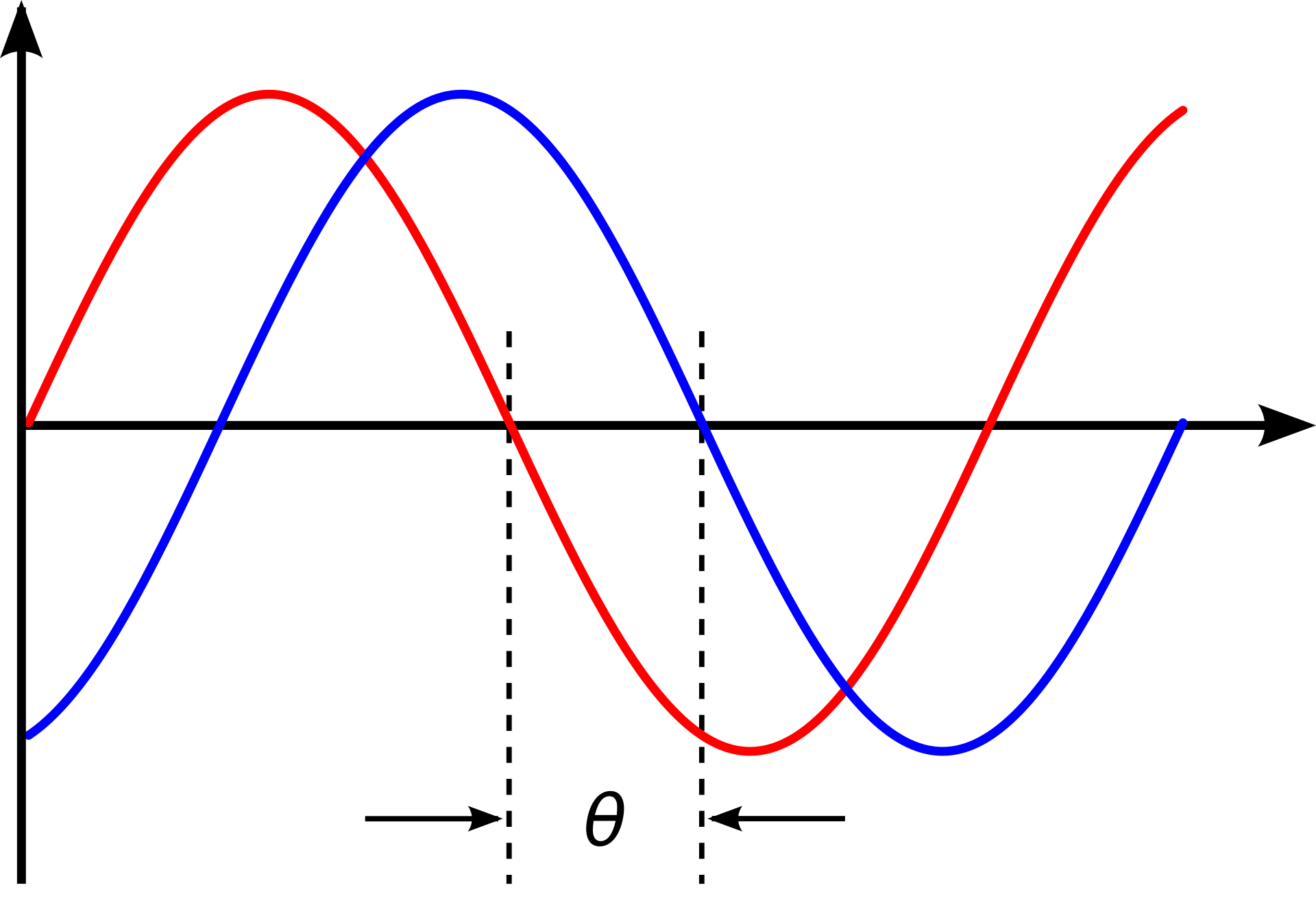
Phase difference, \[\Delta\phi\]
The phase difference or known as phase shift is the difference in the phase angles of two periodic signals. In mathematical terms, if you have two waves described by \[y_{1}(x,t)=A_{1}\sin(k_{1}x-\omega_{1}t+\phi_{01})\] and \[y_{2}(x,t)=A_{2}\sin(k_{2}x-\omega_{2}t+\phi_{02})\]. Then the phase difference \[\Delta\phi\] is given by \[\Delta\phi=\phi_{2}-\phi_{1}\], evaluated at the same \[x\] and \[t\].
If these two waves have the same frequency \[\omega\] and wavenumber \[k\], it simplifies to \[\Delta\phi=\phi_{02}-\phi_{01}\].