tangential and radial acceleration in circular motion
Tangential and radial acceleration in circular motion
We will be taking the equations used in the derivation of angular and tangential velocities in circular motion.
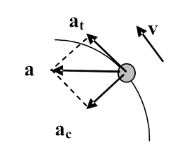
Similarly, the acceleration vector, \[\vec{a}\] can be split into two components, the tangential and radial acceleration.
The tangential component is the component of acceleration that is tangent to the path of the object. It describes the rate at which the tangential speed, \[v\] (magnitude component of the tangential velocity vector) is changing, and is denoted by \[a_{t}\].
\[a_{t}\] is calculated via \[a_{t}=r\cdot \frac{d^{2}\theta(t)}{dt^{2}}\]. Intuitively, this means that the rate of change of the object's speed along the circle is the radius \[r\] multiplied by how fast the angle is changing. Essentially, how rapidly it changes depends on how large the radius of the circle is and how quickly the angle is accelerating.
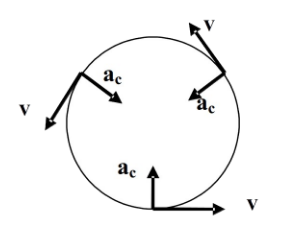
The radial component (more commonly known as centripetal acceleration) is the acceleration directed towards the center of the circular path. It is responsible for changing the directional component of the tangential velocity vector, keeping the object moving in a curved path. It is usually denoted by \[a_{r}\] or \[a_{c}\].
\[a_{r}\] is calculated via \[a_{r}=-r\omega^{2}\], where \[\omega\] is the angular speed and \[\omega=\frac{d\theta}{dt}\]. Even if the tangential speed is constant, the direction of the velocity vector is constantly changing. This requires an inward pull, manifested as the commonly known centripetal acceleration. A larger radius \[r\] means you need more centripetal acceleration to keep an object on a bigger circle at the same angular speed and a faster spin (larger \[\omega\]) dramatically increases the required centripetal acceleration as it grows with \[\omega^{2}\].
There is a slight difference between \[a=r\omega^{2}\] and \[a_{r}=-r\omega^{2}\]. \[a\] is the version we commonly use as we usually just talk about purely the magnitude of centripetal acceleration, while \[a_{r}\] is the component of the acceleration in a coordinate system where \[\hat{r}\] points outward.
Derivation
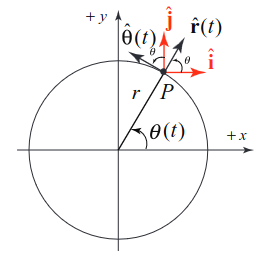
Picture from previous article for reference.
As the acceleration has a tangential component, \[a_{t}\] and a radial component \[a_{r}\], we can write \[\vec{a}=a_{r}\cdot \hat{r}(t)+a_{t}\cdot \hat{\theta}(t)\].
Keep in mind that as the object moves in a circle, the unit vectors \[\hat{r}(t)\] and \[\hat{\theta}(t)\] change direction and are not constant in time.
Suppose that the tangential speed, \[v=r\omega=r \frac{d\theta(t)}{dt}\] varies due to some tangential force, i.e. changing in time. Now, as we've previously established, \[\vec{v}(t)=r \frac{d\theta(t)}{dt}\cdot\hat{\theta}(t)\]. Using the product rule, \[\vec{a}(t)=\frac{d\vec{v}(t)}{dt}=r \frac{d^{2}\theta(t)}{dt^{2}}\cdot\hat{\theta}(t)+r \frac{d\theta(t)}{dt}\cdot \frac{d\hat{\theta}(t)}{dt}\]. Then substituting \[\hat{\theta}(t)=-\sin(\theta(t))\cdot \hat{\imath}+\cos(\theta(t))\cdot \hat{\jmath}\], we get \[\vec{a}=r \frac{d^{2}\theta(t)}{dt^{2}}\cdot\hat{\theta}(t)+r \frac{d\theta(t)}{dt}\cdot \frac{d}{dt}(-\sin(\theta(t))\cdot \hat{\imath}+\cos(\theta(t))\cdot \hat{\jmath})\]. As we've previously derived \[\frac{d\hat{\theta}(t)}{dt}\],
Substitute \[\omega=\frac{d\theta(t)}{dt}\] and \[\hat{r}(t)=\cos(\theta(t))\cdot \hat{\imath}+\sin(\theta(t))\cdot \hat{\jmath}\], \[\vec{a}=r \frac{d^{2}\theta(t)}{dt^{2}}\cdot\hat{\theta}(t)-r\left( \frac{d\theta(t)}{dt} \right)^{2}\cdot \hat{r}(t)\].
The tangential component of acceleration is then given as \[a_{t}=r \frac{d^{2}\theta(t)}{dt^{2}}\] while the radial component is given by \[a_{r}=-r \left( \frac{d\theta(t)}{dt} \right)^{2}=-r\omega^{2}\]. The reason why there's an extra negative sign here is that we're treating \[a_{r}\] as a signed component in the outward-pointing direction \[\hat{r}\]. Since centripetal acceleration points inward, we put a minus sign to show it is directed toward the center. Additionally, since it is guaranteed \[a_{r}<0\], the centripetal acceleration is always directed towards the center of the orbit.
Geometrical interpretation for radial acceleration under uniform circular motion
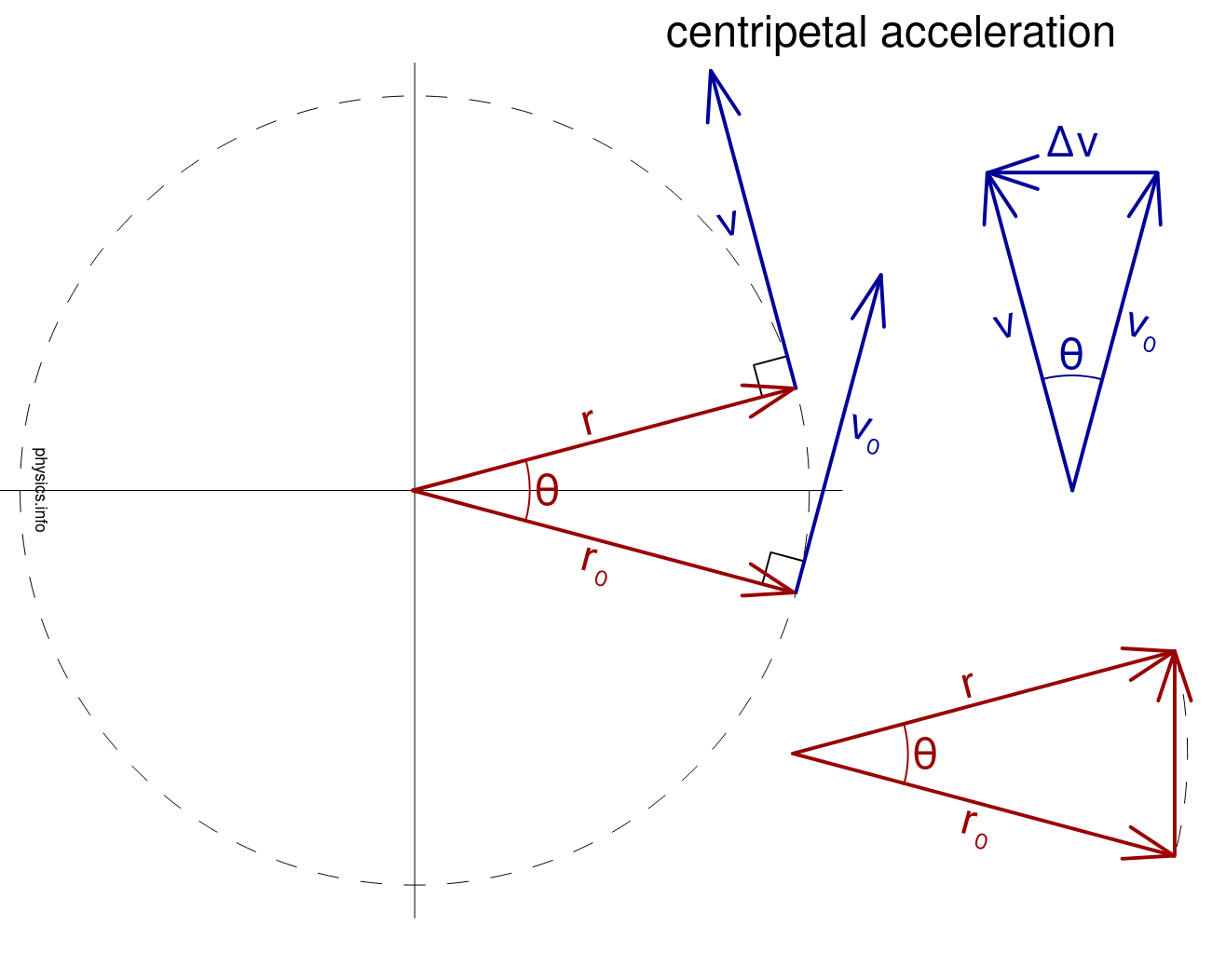
Note that we will be using \[\Delta\theta\] instead of \[\theta\] and \[\vec{v}(t+\Delta t)\] instead of \[v\] and \[\vec{v}\] instead of \[v_{0}\].
Assume the tangential speed is constant as it's uniform motion, i.e. \[a_{t}=0\]. Let \[\vec{v}\] be the tangential velocity vector, tangential speed \[v=r\omega\] and \[\omega=\frac{\Delta\theta}{\Delta t}\]. Let \[\Delta \vec{v}=\vec{v}(t+\Delta t)-\vec{v}(t)\].
First, since the velocity vector does not describe anything about location (i.e. it only contains a quantity with both magnitude and direction), we can relocate both vectors so that they form a triangle similar to the one formed by \[\vec{r}(t)\] and \[\vec{r}(t+\Delta t)\]. These two triangles are similar as both isosceles and have the same angle \[\Delta\theta\].
Therefore, we're going to take advantage of this. Similar to what we've done to find the equation \[v=r\omega\], \[\sin \frac{\Delta\theta}{2}=\frac{\frac{\left\lVert \Delta \vec{v} \right\rVert}{2}}{\left\lVert \vec{v} \right\rVert}\implies \left\lVert \Delta \vec{v} \right\rVert=2v\sin \frac{\Delta\theta}{2}\]. Using small angle approximation, \[\left\lVert \Delta \vec{v} \right\rVert\approx v\Delta\theta\]. Since \[\Delta\theta=\omega\Delta t=\frac{v}{r}\Delta t\], \[\left\lVert \Delta \vec{v} \right\rVert=\frac{v^{2}}{r}\Delta t\].
Since it's uniform motion, we can ignore the tangential acceleration. We're only interested in the centripetal acceleration, which is also the rate of change of velocity, so \[a_{r}=\frac{\left\lVert \Delta \vec{v} \right\rVert}{\Delta t}=\frac{\frac{v^{2}}{r}\Delta t}{\Delta t}=\frac{v^{2}}{r}\].