collisions between two particles
Collision between two particles
Center of mass
For a system of two particles with masses \[m_{1}\] and \[m_{2}\] located at positions \[\vec{x}_{1}\] and \[\vec{x}_{2}\], the center of mass (COM) \[\vec{x}_{G}\] is defined as the mass-weighted average of their positions, i.e. \[\vec{x}_{G}=\frac{m_{1}\vec{x}_{1}+m_{2}\vec{x}_{2}}{m_{1}+m_{2}}\]. Similarly, the velocity of the center of mass, i.e. the time derivative of the position of the center of mass, \[\vec{v}_{G}=\frac{d\vec{x}_{G}}{dt}=\frac{m_{1}\vec{v}_{1}+m_{2}\vec{v}_{2}}{m_{1}+m_{2}}\].
Collisions involve internal forces (forces the particles exert on each other), conservation of momentum tells us that the total momentum \[\vec{p}=(m_{1}+m_{2})\cdot\vec{v}_{G}\], of the system remains constant provided no external net force acts. Tracking the COM directly encodes total momentum conservation in one neat mathematical object.
In many collision problems, especially elastic collisions, inelastic collisions, or scattering, switching to the COM frame can drastically simplify calculations, because in that frame the total momentum is zero. This can make it easier to track energy changes and recoil motions.
1-dimensional collisions
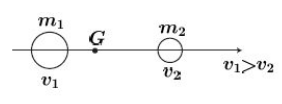
Let particle 1 of mass \[m_{1}\] occupy position \[x_{1}\] and travel with velocity \[v_{1}\] along a straight line, the particle 2 also defined with similar notations, and let particle 1 and particle 2 travel in the same direction. Assume particle 1 is moving faster than particle 2.
We can then introduce the position of the center of mass \[x_{G}=\frac{m_{1}x_{1}+m_{2}x_{2}}{m}\] where \[m=m_{1}+m_{2}\] and velocity of the center of mass \[v_{G}=\frac{m_{1}v_{1}+m_{2}v_{2}}{m}\]. Since conservation of momentum states that \[m_{1}v_{1}+m_{2}v_{2}=m_{1}v_{1}^{\prime}+m_{2}v_{2}^{\prime}\], where the prime notation implies final velocity, we can see that \[v_{G}\] remains unchanged by the collision process between the particles.
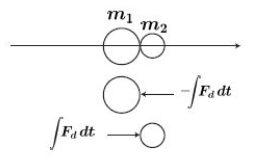
When particle 1 finally catches up to particle 2 and collides with it, they deform slightly under the collision force, and the force between them will increase until they reach a point where they cannot be compressed any further without losing more energy or permanently deforming.
At this particular instant, the particles' relative velocity is momentarily zero as they are momentarily moving together, which also tells us that they are traveling at the same velocity \[v_{G}\]. Additionally, the impulse applied to particle 1 and 2 from the deformation force is equal to the change in momentum in the deformation process.
Mathematically, particle 1 experiences an impulse \[-\int F_{d}\,dt=p_{1f}-p_{1i}=m_{1}v_{G}-m_{1}v_{1}\] and particle 2 experiences an impulse in the opposite direction \[\int F_{d}\,dt=p_{2f}-p_{2i}=m_{2}v_{G}-m_{2}v_{2}\].
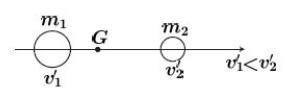
After the instant of maximal deformation, the impulse applied from the restoring force is equal to the change in the momentum in the restoration process, i.e. similarly \[-\int F_{r}\,dt=m_{1}v_{1}^{\prime}-m_{1}v_{G}\] and \[\int F_{r}\,dt=m_{2}v^{\prime}_{2}-m_{2}v_{G}\].
In an ideal, perfectly elastic collision the compression force \[F_{d}\] and the restoring force \[F_{r}\] would be equal, so the impulse delivered during restoration, i.e. \[\int F_{r}\,dt\], would perfectly return all the stored elastic potential energy back as kinetic energy, conserving both momentum and energy. However, in real collisions \[F_{r}\] is usually slightly less than \[F_{d}\] so that although the total impulse still balances to conserve momentum, the impulse from restoration is somewhat smaller, resulting in a small energy loss. This happens because as the particles collide they compress and store energy as elastic potential energy while their momentum is reduced toward a common value near \[(m_{1} + m_{2})\cdot v_{G}\]; then, during restoration, \[F_{r}\] acts over a short time to change the momentum from \[m\cdot v_{G}\] to \[m\cdot v^{\prime}\], and since impulse is a vector this change both alters the speed and reverses the direction of the particles, converting the stored energy back into kinetic energy while slightly reducing the total recovered energy.
This brings us to the coefficient of restitution. We define it as the ratio between the restoration and deformation impulses, although sounds different from the usual definition, it's still the same thing. For particle 1, \[e=\frac{\int F_{r}\,dt}{\int F_{d}\,dt}=\frac{-(m_{1}v_{1}^{\prime}-m_{1}v_{G})}{-(m_{1}v_{G}-m_{1}v_{1})}\implies (e+1)v_{G}=v_{1}^{\prime}+ev_{1}\], and for particle 2, \[e=\frac{\int F_{r}\,dt}{\int F_{d}\,dt}=\frac{m_{2}v_{2}^{\prime}-m_{2}v_{G}}{m_{2}v_{G}-m_{2}v_{2}}\implies (e+1)v_{G}=v_{2}^{\prime}+ev_{2}\]. Combining both these equations we get \[v_{1}^{\prime}+ev_{1}=v_{2}^{\prime}+ev_{2}\implies e=\frac{v_{1}^{\prime}-v_{2}^{\prime}}{v_{2}-v_{1}}=-\frac{v_{1}^{\prime}-v_{2}^{\prime}}{v_{1}-v_{2}}\].
Oblique collisions
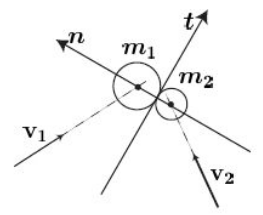
In the case of oblique collisions, we consider the instant of impact and define the normal direction \[n\] along the line that connects the two center of masses of the particles, and the tangential direction, \[t\], along the line tangent to the surfaces at the point of contact.
We then write equations of conservation of momentum in the tangent and normal directions. Since the force contact is assumed to act along the normal direction, the conversation of linear momentum along the tangential direction implies that the tangential component of the particles' velocity is \[m_{1}v_{1t}=m_{1}v_{1t}^{\prime}\implies v_{1t}=v_{1t}^{\prime}\], or essentially unchanged. Same goes with the second particle, \[m_{2}v_{2t}=m_{2}v_{2t}^{\prime}\implies v_{2t}=v_{2t}^{\prime}\].
Then, in the normal direction, we solve it as if it's a one-dimensional problem, that is taking the normal component of the velocity of each particle, solving for \[m_{1}v_{1n}+m_{2}v_{2n}=m_{1}v_{1n}^{\prime}+m_{2}v_{2n}^{\prime}\] and \[e=-\frac{v_{1n}^{\prime}-v_{2n}^{\prime}}{v_{1n}-v_{2n}}\]. Do note that the direction must be taken into consideration when substituting for \[v\] in both equations.
To calculate the amount of kinetic energy lost, we just have to factor in the normal component of the velocity of each particle, since the tangential components cancel themselves out as they're unchanged. Thus, \[\Delta K=\left( \frac{1}{2}m_{1}v_{1n}^{2}-\frac{1}{2}m_{2}v_{2n}^{2} \right)-\left( \frac{1}{2}m_{1}\left( v^{\prime}_{1n} \right)^{2}-\frac{1}{2}m_{2}\left( v_{2n}^{\prime} \right)^{2} \right)\].
The reason why we solve only for the force along the normal line is that friction between the particles are being ignored. Therefore one of them cannot apply a force to the other except perpendicular the to shared tangent plane where the two surfaces touch. The real world does not work that way, therefore it's just a convenient assumption that allows us to ignore the fact that the balls could be spinning in addition to just moving about rectilinearly.
Angle of deflection
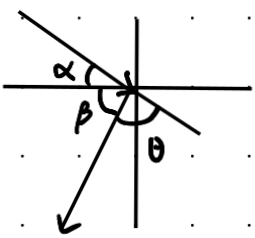
Once the speed and direction of a sphere after a collision have been calculated, we can find the angle of deflection, i.e. the angle by which the path of the object has changed from its original trajectory. \[\theta\] is given by \[\theta=180^{\circ}-\alpha-\beta\].