equilibrium of coplanar forces
Equilibrium of coplanar forces
Coplanar means that the lines of action of all the forces are in a single plane, i.e. in 2D. A body will be in equilibrium under the action of coplanar forces if the resultant is zero and the moment about any point is zero.
Examples
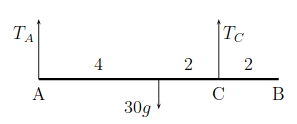
Assume a uniform plank, \[AB\], is 8 meters long and has mass 30 kilograms. It is supported in equilibrium in a horizontal position by two vertical inextensible ropes. One of the ropes is attached to the plank at \[A\] and the other rope to point \[C\], where \[BC\] is 2 meters.
Resolving the forces,
- Vertically: \[T_{A}+T_{C}=30g\]
- Moments about \[A\]: \[6\times T_{C}=4\times 30g\]
- Moments about \[C\]: \[6\times T_{A}=2\times 30g\]
With the forces resolved, it becomes trivial to find the tensions of both strings, i.e. \[T_{C}=196.2\text{N}\] and \[T_{A}=98.1\text{N}\].
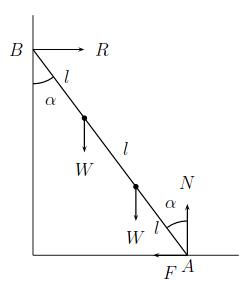
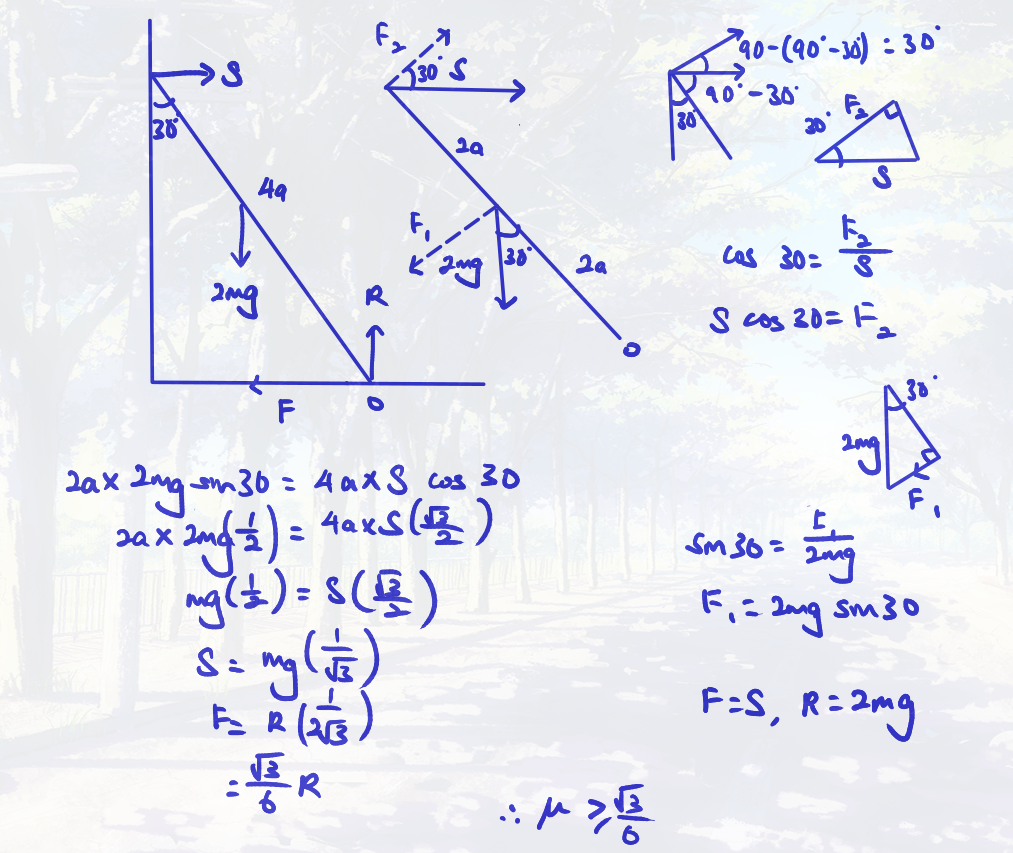
A light rod of length \[3l\] leans against a smooth vertical wall and a rough horizontal floor at an angle \[\alpha\] to the downward vertical. Weights \[W\] are placed at \[\frac{1}{3}\] and \[\frac{2}{3}\] of the way along the rod.
Resolving the forces,
- Vertically: Normal reaction at the base of the rod, \[N=2W\]. While the positions of the weights along the rod do affect calculations for moments, it does not change the fact that the upwards normal reaction force must be equal to the sum of the downward forces to satisfy vertical equilibrium.
- Horizontally: Normal reaction at the top of the rod, \[R=F\] where \[F\] is the frictional force. The only horizontal forces acting on the rod are the normal force from the wall at its tip and the frictional force at the base.
-
Torque at point \[A\]: One of the requirements for a system to be at equilibrium is for the moment about any point being zero, using the formula \[\left\lVert \vec{\tau} \right\rVert=\left\lVert \vec{r}\times\vec{F} \right\rVert=rF\sin\theta\], \[lW\sin\alpha+(2l)W\sin\alpha-(3l)R\sin(90-\alpha)=0\]. Simplifying everything, \[(3l)R\sin(90-\alpha)=(3l)R\cos\alpha\], \[(3l)W\sin\alpha=(3l)R\cos\alpha\implies R=W\tan\alpha\].
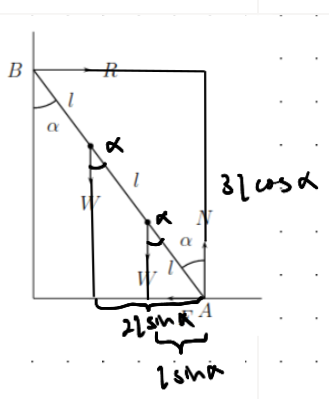
Additional note: To calculate the torque using the line of action for each force, we break each force into it's horizontal and vertical components (though it doesn't apply here as all of them are fully vertical/horizontal), which gives us \[W\cdot l\sin\alpha+W\cdot 2l\sin\alpha-R\cdot 3l\cos\alpha=0\].
Next, to calculate verify \[N=2W\], we repeat a similar process with the formula for torque, \[lW\sin\alpha+(2l)W\sin\alpha+(3l)F\sin(90-\alpha)=(3l)N\sin\alpha\], though this time we have to factor in the friction, which acts clockwise (same direction as the weights). Substituting \[F=R=W\tan\alpha\], \[(3l)W\sin\alpha+(3l)(W\tan\alpha)(\cos\alpha)=(3l)N\sin\alpha\implies (6l)W\sin\alpha=(3l)N\sin\alpha\], showing that \[N=2W\].
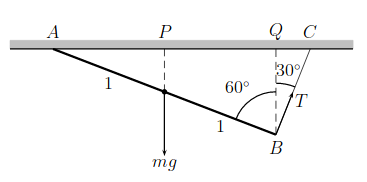
A uniform rod of mass 3 kilograms and length 2 meters has one end attached by a smooth hinge to a ceiling at \[A\]. The other end \[B\] is attached to a light inelastic string. The other end of the string is attached to the ceiling at \[C\]. The rod makes an angle of \[30^{\circ}\] with the horizontal and the string an angle of \[60^{\circ}\] to the horizontal.
To find the tension of the string, one can use either the formula or line of actions. Similar to our previous example, as the system is at equilibrium, the moment at \[A\] must be zero, therefore the formula tells us that \[(1)(mg)(\sin 60^{\circ})=(2)(T)(\sin 90^{\circ})\], substituting and simplifying everything we get \[T=12.74\text{N}\] (assuming \[g=9.81\text{ms$^{-2}$}\]).
If we use line of actions, it would be \[(mg)(1)(\cos30^{\circ})=2T\implies T=12.74\text{N}\].
Friction coefficient
The coefficient of friction (\[\mu\]) is a dimensionless scalar value that quantifies how much frictional force can be produced for a given amount of normal force.
The frictional force \[F\] is directly proportional to the normal force \[R\]. This relationship is described by the equation, \[F=\mu R\]. The reason the equation stands is that \[F\] depends on \[R\] because the interaction at the contact point (where the base of the rod meets the floor in the example above) produces friction based on how tightly the ladder is pressed down by \[R\], not how much it is pushed sideways by \[S\].
NOTE: If we want to calculate the range of values for the coefficient of friction that would allow the rod to stay in position, we use \[F\le\mu R\] as \[\mu R\] is like an upper limit for how much friction can be generated, while \[F\] isn't necessarily constantly equal to \[\mu R\], but a necessarily high \[\mu R\] is required to keep the rod in place.
Calculating the coefficient
Referring back to the example above, we assume that \[\tan\theta=\frac{3}{4}\], by using a right-angled triangle, we know that \[\sin\theta=\frac{3}{5}\] and \[\cos\theta=\frac{4}{5}\].
To calculate the coefficient required to keep the rod from slipping, we simply calculate the moment at point B while assuming it is in perfect equilibrium (clockwise = anticlockwise force):
Example question
Tipping point of an object on a rough surface
Consider an object placed on a rough slope and assuming the frictional coefficient is high enough to prevent slipping, how do we determine the maximum angle of slope before the object falls?
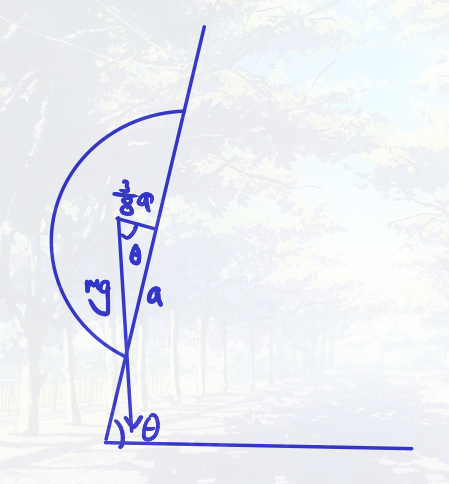
Here we have a hemisphere on a slope, and it is known that when an object is about to topple, it's center of mass will pass through the very edge of the object (as shown above). Therefore the angle of tipping can be found via \[\tan\theta=\frac{a}{\frac{3}{8}a}=\frac{8}{3}\], \[\theta=69.4^{\circ}\].
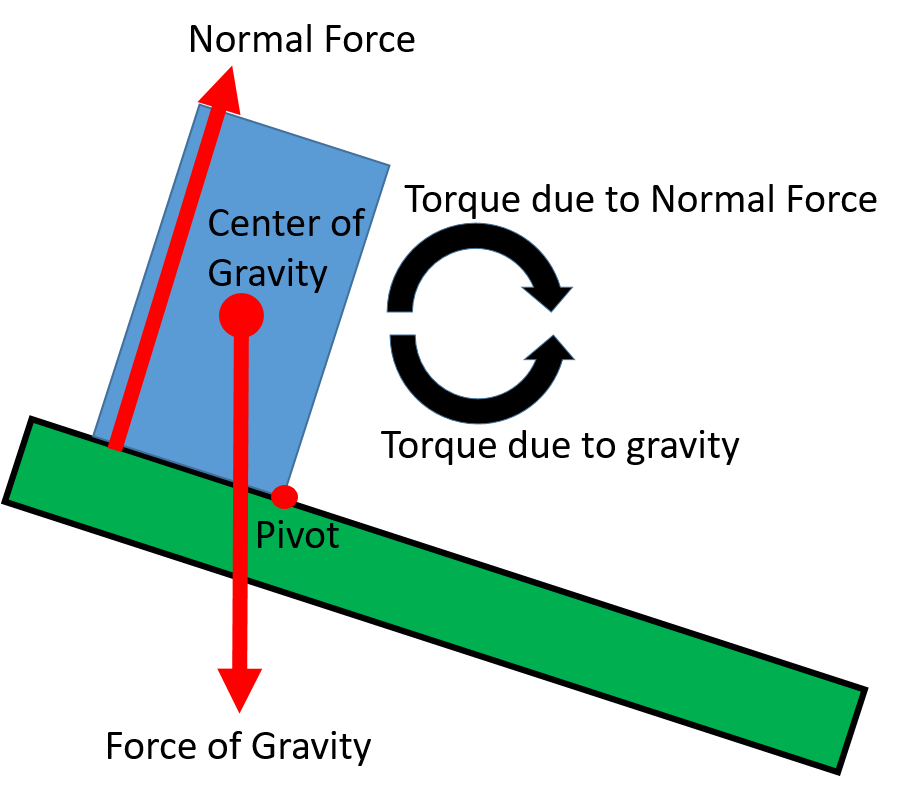
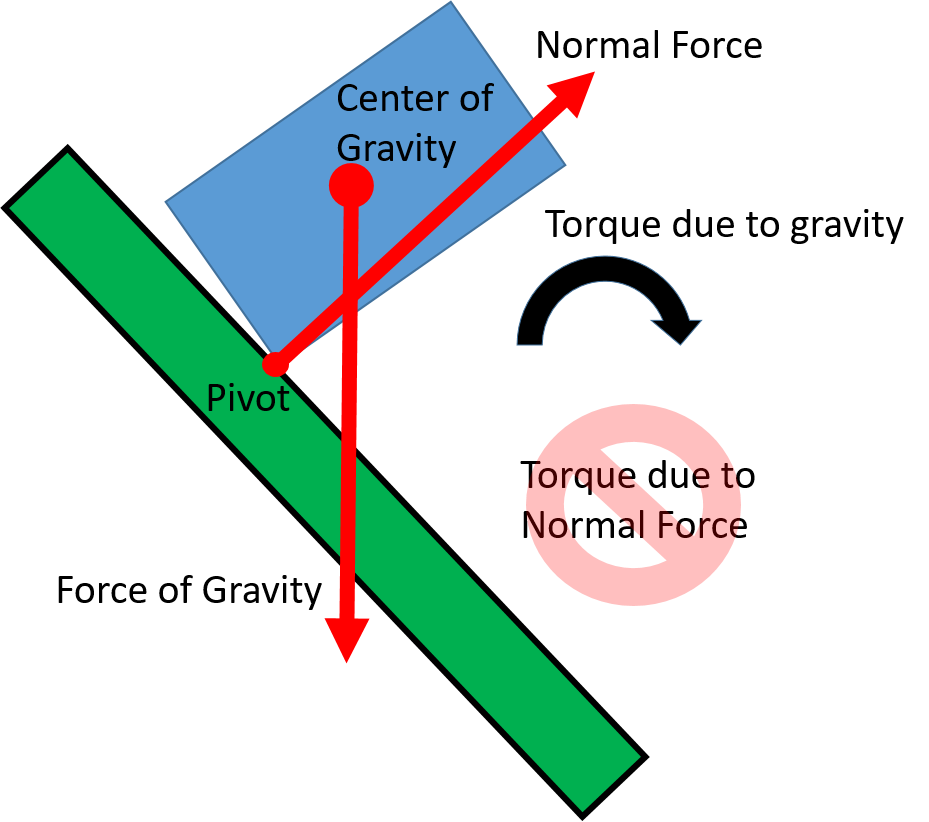
The reason behind this is that when a center of gravity of a body is above the area formed by the support base the normal force can provide the torque necessary to remain in rotational equilibrium. The critical tipping point is reached when the center of gravity passes outside of the support base. Beyond the tipping point, gravity causes rotation away from the support base, so there is no normal force available to cause the torque needed to cancel out the torque caused by gravity. Which is why, the tipping point is when the center of gravity aligns directly with the edge of the object.
Suspended objects
Consider a rod shaped like a D hanging by one of it's points:
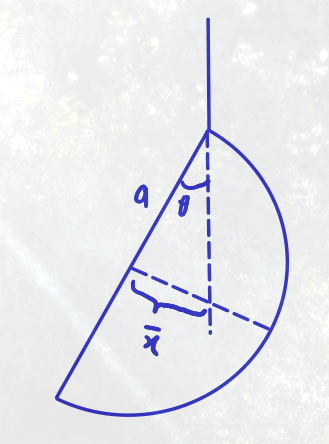
Note that since gravity pulls downward on the center of mass, an object will always try to orient itself such that the center of mass is directly below the point of support, i.e. the downwards vertical will always pass through the center of mass.
To calculate the angle between the rod the vertical, \[\theta\], we will use \[\tan\theta=\frac{\overline{x}}{a}\], which would be:
Sliding and tilting
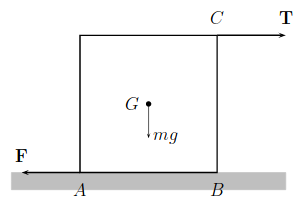
A cube of side 2 meters and mass \[m\] kilograms rests on a rough horizontal surface with coefficient of static friction is \[\mu\]. The cube is pulled in a horizontal direction by a light extensible string attached at \[C\]. The tension in the string \[\mathbf{T}\] is gradually increased starting from 0.
Show that if \[\mu=0.6\] the cube will tilt, while if \[\mu=0.2\] the cube will slide before tilting.
Clearly if it does tilt then it will rotate about \[B\], and for the cube to tilt the total moment about \[B\] must be greater than 0. Since gravity acts on the center of mass, and the line of action of the force acting on the center of mass of the cube is 1 meter away horizontally from point \[B\], the total moment about \[B\] can be calculated with \[1\times mg-2\times T\]. Which tells us that at the point it is just about to tilt, \[T=\frac{1}{2}mg\].
Assuming there is no vertical or horizontal motion, similar to our previous calculations, resolving vertically, the normal force, \[R=mg\] and resolving horizontally, \[T=F\]. Therefore, \[F=\frac{1}{2}R\implies \mu=0.5\].
To answer the question posed, if \[\mu\ge0.5\], then it will tilt first, as the frictional force can get as large (or more) as \[\frac{1}{2}mg\], making it tip rather than slide. If \[\mu<0.5\], the friction force cannot reach \[\frac{1}{2}mg\], so it cannot tip.
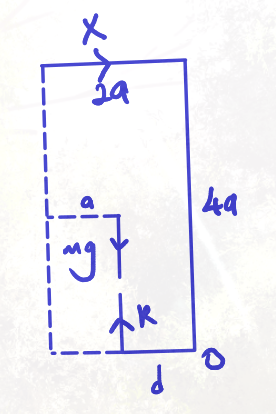
Consider a cuboid of dimensions \[2a\cdot2a\cdot4a\] with mass \[m\]. We are applying a force, \[X\] on the top left of the cuboid, and \[R=mg\]. At O, the moment clockwise is equal to anti-clockwise.
Toppling point
The toppling point of this cuboid would be at \[X=\frac{1}{4}mg\] as
\[d=0\], meaning that the center of mass is now directly above \[O\], which as mentioned above would be the point of tipping.
Sliding
Left \[F\] be the frictional force of the cuboid and a flat surface. If we want to prevent the cuboic from sliding the frictional coefficient would need to be, \[X=F=\mu R\], \[\mu>\frac{1}{4}\].
If \[\mu=\frac{1}{8}\] and \[X=\frac{1}{4}mg\], \[F_{\text{max}}=\frac{1}{8}R\] which would allow the cuboid to slide before toppling (if \[X\] is further increased beyond \[\frac{1}{4}mg\]).
Referenced by:
No backlinks found.