integration by parts
Integration by parts
Intuitive explanation
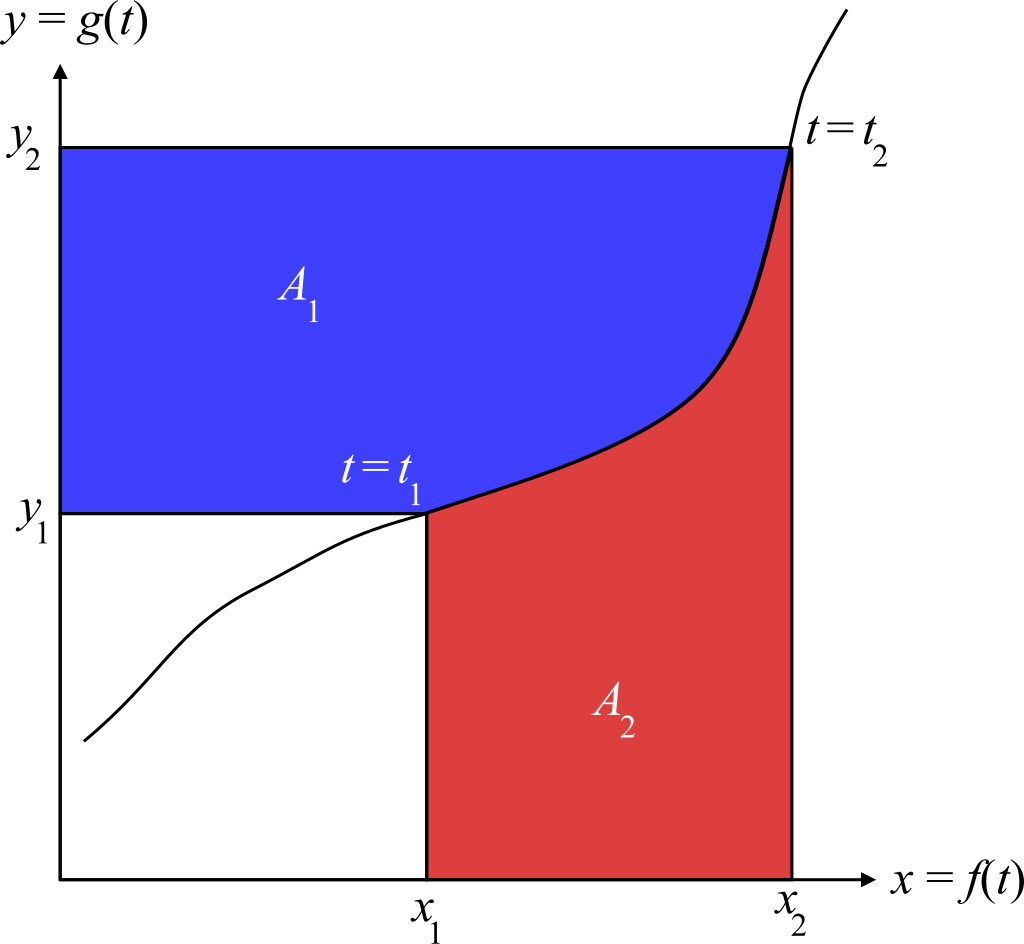
Integration by parts may be thought of as deriving the area of the blue region (\[A_{1}\]) by subtracting the smaller rectangle \[x_{1}y_{1}\] and \[A_{2}\] from the larger rectangle \[x_{2}y_{2}\].
Consider a parametric curve \[\left( x,y \right)=\left( f(t),g(t) \right)\]. We can then define \[x(y)=f(g^{-1}(y)),y(x)=g(f^{-1}(x))\], which can be derived by:
Then define \[x(y)=f(g^{-1}(y))\] which explicitly states that for \[x\] is a function of \[y\]. The similar can be shown for \[y(x)=g(f^{-1}(x))\].
The areas can then be defined as \[A_{1}=\int_{y_{1}}^{y_{2}}x(y)\,dy,A_{2}=\int_{x_{1}}^{x_{2}}y(x)\,dx\] and \[A_{1}+A_{2}=\biggl[ x\cdot y(x) \biggr]_{x_{1}}^{x_{2}}=\biggl[ y\cdot x(y) \biggr]_{y_{1}}^{y_{2}}\].
The equality \[\biggl[ x\cdot y(x) \biggr]_{x_{1}}^{x_{2}}=x_{2}y_{2}-x_{1}y_{1}\] can then be derived via,
To write the formula in terms of \[t\], since \[(x,y)=(x(t),y(t))\] (meaning \[x\] and \[y\] are functions of \[t\]), then \[dy=\frac{dy}{dt}dt\] and \[dx=\frac{dx}{dt}dt\]. Additionally, \[y(t_{1})=y_{1}\], \[x(t_{2})=t_{2}\], etc., therefore,
Notice that we can combine it to form \[\int_{t_{1}}^{t_{2}}[x(t)y^{\prime}(t)+y(t)x^{\prime}(t)]\,dt\], which we can then use the Leibniz product rule to write \[\frac{d}{dt}(x(t)y(t))=x(t)y^{\prime}(t)+y(t)x^{\prime}(t)\].
Integrate the derivative,
as the second fundamental theorem of calculus and the definition of antiderivative tells us that if \[F^{\prime}(t)=f(t)\] then \[\int_{t_{1}}^{t_{2}}f(t)=\biggl[ F(t) \biggr]_{t_{1}}^{t_{2}}\].
Which produces the formula, \[\int_{t_{1}}^{t_{2}}x(t)y^{\prime}(t)\,dt+\int_{t_{1}}^{t_{2}}y(t)x^{\prime}(t)\,dt=\biggl[ x(t)y(t) \biggr]_{t_{1}}^{t_{2}}\], or \[\int_{t_{1}}^{t_{2}}x(t)y^{\prime}(t)\,dt=\biggl[ x(t)y(t) \biggr]_{t_{1}}^{t_{2}}-\int_{t_{1}}^{t_{2}}y(t)x^{\prime}(t)\,dt\].
When rewritten into the indefinite integral form, we get \[\int x(t)y^{\prime}(t)\,dt=x(t)y(t)-\int y(t)x^{\prime}(t)\,dt\] (we usually omit the \[C\] when writing the formula as it is an arbitrary constant).
Proof
The integration by parts formula states: \[\int u(x)v^{\prime}(x)\,dx=u(x)v(x)-\int u^{\prime}(x)v(x)\,dx\].
This theorem can be derived using the product rule. Let \[u(x)\] and \[v(x)\] be continuously differentiable functions.
Then, the product rule states that \[\left( u(x)v(x) \right)^{\prime}=u^{\prime}(x)v(x)+u(x)v^{\prime}(x)\]. Integrating both sides we get \[\int \left( u(x)v(x) \right)^{\prime}\,dx=\int u^{\prime}(x)v(x)\,dx+\int u(x)v^{\prime}(x)\,dx\].
Now using the definition of antiderivatives we get \[u(x)v(x)=\int u^{\prime}(x)v(x)\,dx+\int u(x)v^{\prime}(x)\,dx\] or \[\int u(x)v^{\prime}(x)\,dx=u(x)v(x)-\int u^{\prime}(x)v(x)\,dx\].
If we take the integral from \[a\] to \[b\] of both sides, we get \[\int_{a}^{b} u(x)v^{\prime}(x)\,dx=\biggl[ u(x)v(x) \biggr]_{a}^{b}-\int_{a}^{b} u^{\prime}(x)v(x)\,dx\].
LIATE rule
The LIATE rule is a rule of thumb for integration by parts. It involves choosing as \[u\] the function that comes first in the following list:
- Logarithmic functions, e.g. \[\ln(x),\log_{b}(x)\]
- Inverse trigonometric functions, e.g. \[\sin^{-1}(x)\]
- Algebraic functions, e.g. \[3x^{2}\]
- Trigonometric functions, e.g. \[\sin(x)\]
- Exponential functions, e.g. \[e^{x},19^{x}\]
Additionally, there are a few typical situations where we should try to use integration by parts, see here.
Examples
Evaluate \[\int_{0}^{4}xe^{-x}\,dx\].
Following the LIATE rule, let \[u(x)=x\] and \[v^{\prime}(x)=e^{-x}\]. Then, \[u^{\prime}(x)=1\] and \[v(x)=\int e^{-x}\,dx=-e^{-x}\].
Now, there are also cases where we have to apply the formula more than once. Evaluate \[\int\left( x-1 \right)^{3}e^{2x}\,dx\].
Again, following the LIATE rule, let \[u(x)=\left( x-1 \right)^{3}\] and \[v^{\prime}(x)=e^{2x}\]. Then, \[u^{\prime}(x)=3(x-1)^{2}\cdot 1\] and \[v(x)=\int e^{2x}\,dx=\frac{e^{2x}}{2}\].
Using the formula, we would get \[\int (x-1)^{3}e^{2x}\,dx=\left( (x-1)^{3}\cdot \frac{e^{2x}}{2} \right)-\int \left( 3(x-1)^{2}\cdot \frac{e^{2x}}{2} \right)\,dx\]. However, this is not the final answer, as we now have to solve for \[\int \left( 3(x-1)^{2}\cdot \frac{e^{2x}}{2} \right)\,dx\]. Thus, we repeat the entire process again. Let \[u(x)=3(x-1)^{2}\] and \[v^{\prime}(x)=\frac{e^{2x}}{2}\]. Then, \[u^{\prime}(x)=6(x-1)\cdot 1\] and \[v(x)=\int \frac{e^{2x}}{2}\,dx=\frac{e^{2x}}{4}\].
We will then recursively repeat this process for every new integral that's produced until there are no more integrals left:
To make this process less painful, we can draw a table as such:
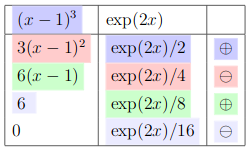
where we repeatedly differentiate the left column and integrate the right column until one of the rows get to zero.